Safari Homebot
A domestic robot redesign.
Project Duration: 12 weeks | Spring 2021
Project Vision
Kuri was a domestic robot and home companion, priced at around $700. Kuri was an app-driven robot that could take videos with a high-def camera, play music and dance. The objective of the project was to pick a robot that was marketed and sold to the public. I chose this robot design because there was potential for change based on the Gartner Hype Cycle. Domestic robots are on the Slope of Enlightment. Domestic robots are not commerically available yet because they are glorified “Narrow AI” that only have a few features. With my design, I wanted to create a robot that was dependable, affectionate, engaging, intelligent, and futuristic. My robot design design features would include arm movement, projection, and connection to other electronic devices and AI assistants.
Design Constaints & Requirements
Redesign a robot that is/was on the market and commerically sold.
Update the current technology and add artificial intelligence as a feature.
Use more than two manufacturing methods and material types.
Choose one unique manufacturing method for one part of the robot.
Add a COVID-19 safety feature and explain why this feature could benefit users.
Create a futuristic design of your final redesign to show how your robot could look in 20+ years.
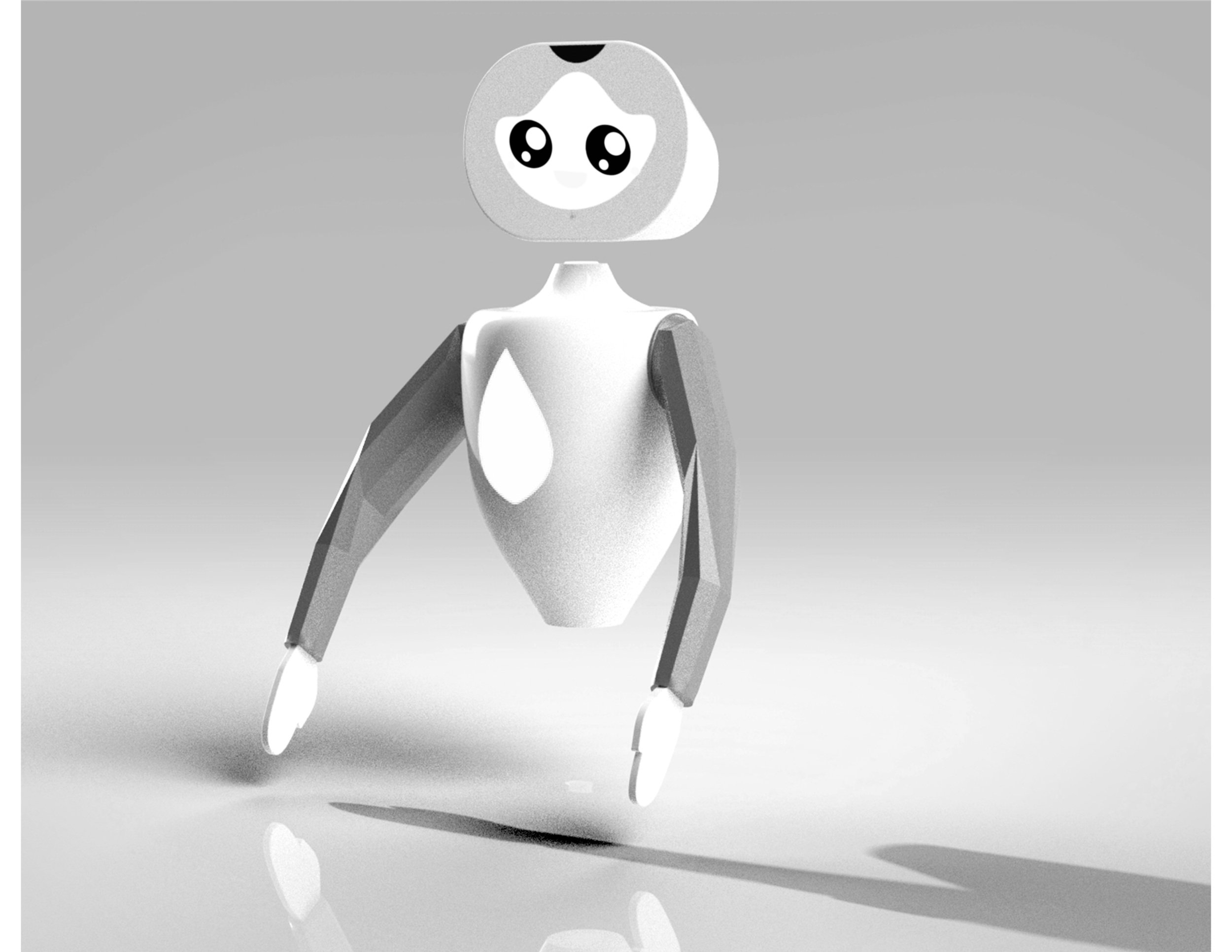
I designed an innovative and interactive domestic robot that updated the quality of the original Kuri robot design.
-
![]()
Inspiration Board
I started my process by creating a large inspiration board with lots of words and images. I eliminated items until I decided on five elements: dependable, affectionate, engaging, intelligent, and futuristic.
-
![]()
Concept Sketches
After creating a mood board for all five characteristics, I created sketches and came up with my design. I included arms and hands, a touch screen, artificial intelligence, and modular wheels.







Innovation
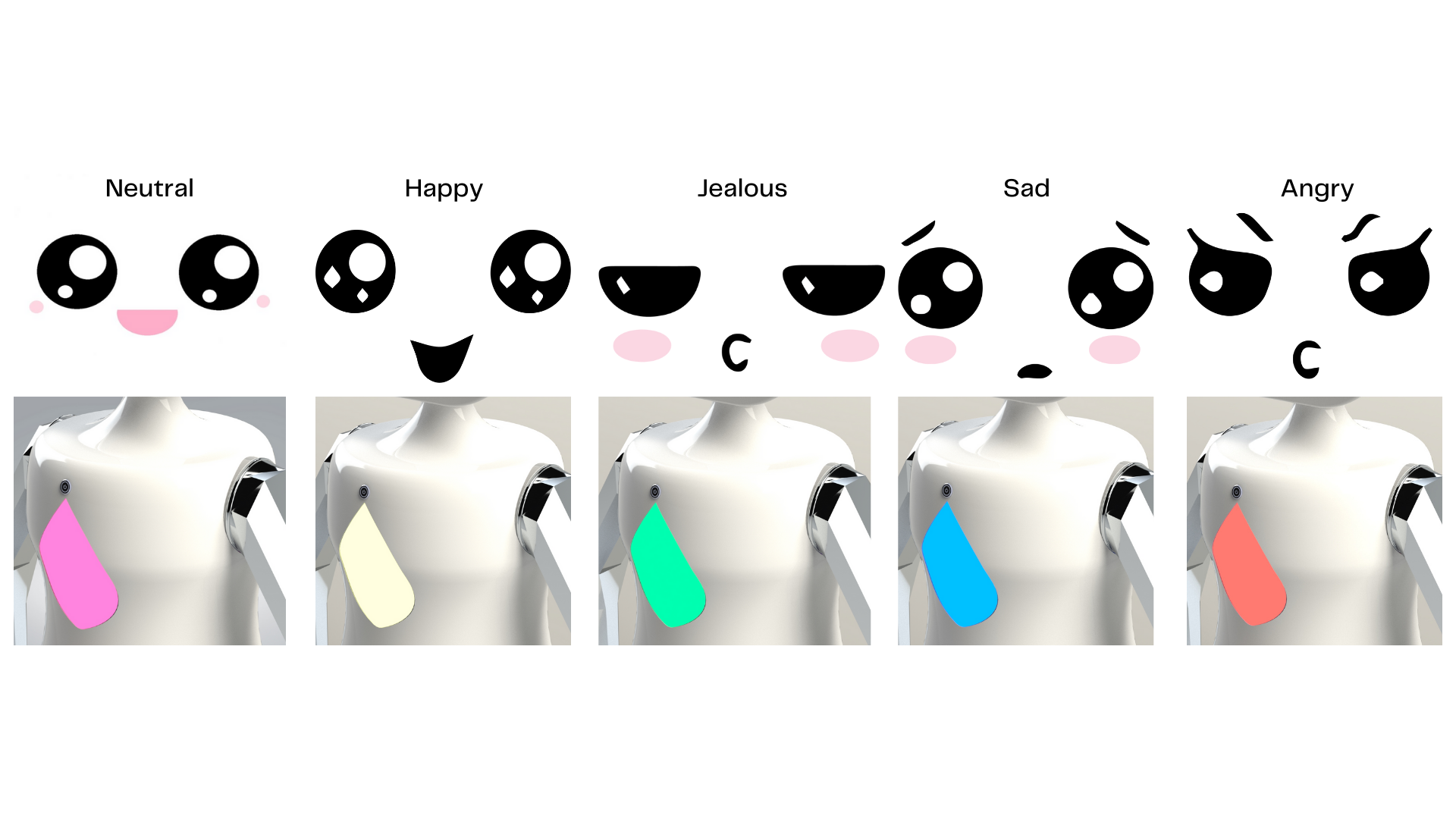
Visual Emotions
A robot showing emotions is vital for actively demonstrating to the user how the robot feels and acts. Using LED lights to display colors with corresponding faces on the tablet helps demonstrate this concept. This allows users to know how the robot is feeling without having to think about it. Right away, users can easily tell.
Manufacturing, Projection, & Transportation

Industrial Origami Arms: To fullfill my requirement of choosing a unique manufacturing method, I chose to design the arms of the robot out of aluminum sheet metal using industrial origami. This process creates precice parts and is incredibly flexible, modular, and strong. This process and design allows the arms to be folded into the body when the robot is not in use.

Projection: The camera is below the tablet screen on the robot’s head. This camera has detection capabilities using artificial intelligence and can project images and videos on walls.

Omni Wheels: I chose to make wheels that can allow the robot to easily maneuver in a home and rotate 360 degrees quickly. These wheels have 5 tires on each wheel plate, and two plates for the left and right wheels. The wheels are cut with CNC machine and attach to a single axel which is attached to the interior of the robot’s body for mobility.
-
Orthographics
Dimensions: 40” x 20” x 20”

-
Exploded View



Renderings